создайте профиль
Georgia Tech's AMBER-Lab: инженеры создали гуманоида, способного передвигаться как человек

Человекоподобный робот по имени DURUS с «натуральными характеристиками локомоции»




Инженеры-разработчики из Технологического института штата Джорджия (Georgia Institute of Technology) работают над созданием человекоподобного робота, который был бы способен передвигаться подобно тому, как это делаем мы, люди. Своё детище они назвали Durus.
Зачем им нужен робот, который умеет «ходить как человек»? Точно сказать не могу. Вероятно, их вдохновил фильм «Терминатор», ну или эти ребята работают оп принципу «технологии ради технологий, а там куда кривая судьбы выведет». Словом, чего не сделаешь ради мечты.
А если серьёзно, то в будущем разработки, подобные этой, позволят сделать значительный шаг вперёд в сфере протезирования утраченных конечностей, а также в деле создания более совершенных моделей экзоскелетов.
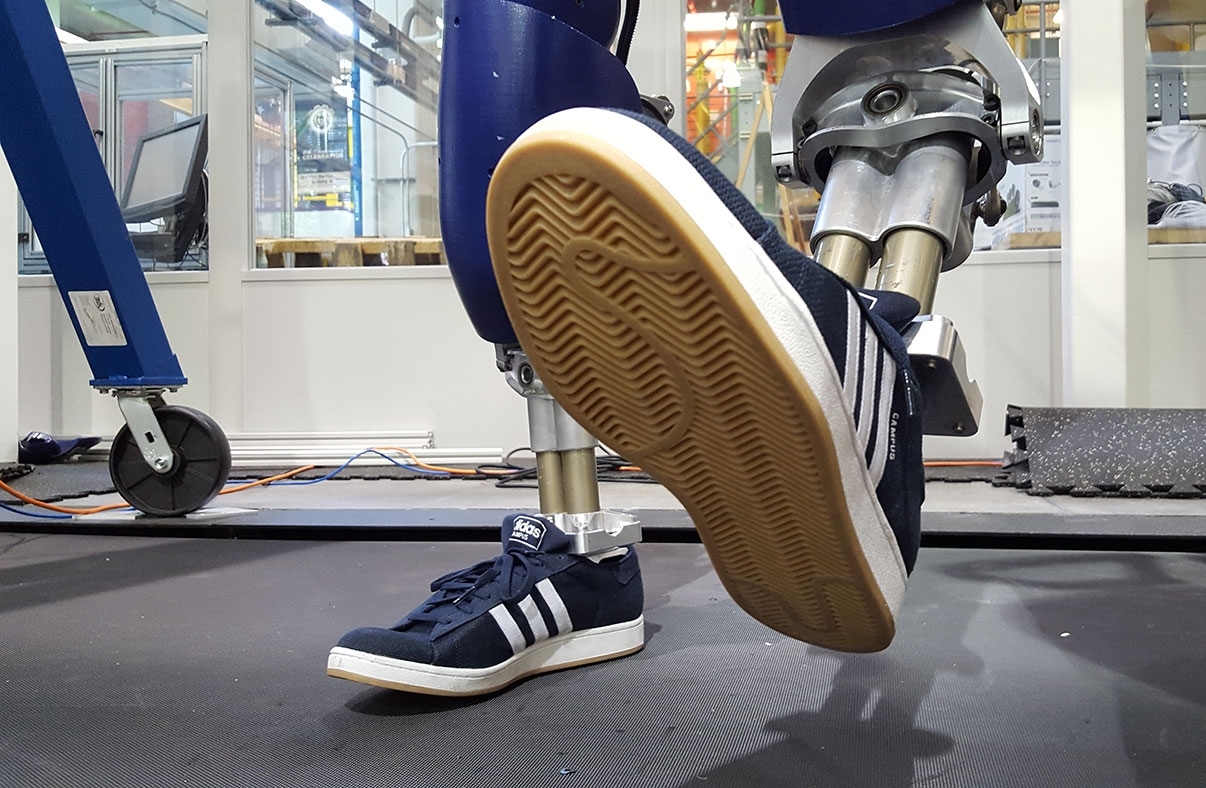
Что касается технической стороны вопроса, то Durus посредством хитромудрой системы сервоприводов в точности копирует бипедальную локомоцию человека, т.е. перемещение себя по какой-либо поверхности при помощи пары конечностей (в нашем случае это ноги): вначале робот наступает на пяточную область стопы, а затем отталкивается «носком» от опоры (поверхность беговой дорожки).
Однако и этого инженерам показалось мало: для того, чтобы бездушная машина ещё больше походила на человека, робота обули в спортивные мокасины.
Видеоролик, в котором робот Durus демонстрирует способность ходить «по-человечески», опубликован 12 июля на официальном YouTube-канале исследовательской лаборатории AMBER-Lab.
По словам разработчиков, программное обеспечение, система сервоприводов, а также механизмы амортизации, расположенные в зоне сочленения «стопы» с «голенностопом», формирующие аппаратную часть Durus, позволяют этой человекоподобной машине с точностью воспроизводить почти весь спектр двигательной моторики, которая формирует то, что мы по совокупности признаков называем «естественной походкой человека».
Когда робот, совершая шаг, касается пяткой земли, амортизационные пружины аккумулируют механическую энергию, которая возникает в результате удара ноги об поверхность, а затем эта энергия используется для совершения следующего шага. Как и следовало ожидать, это позволяет повысить энергоэффективность системы, её автономность, а также отчасти снизить эксплуатационные расходы.
«Благодаря более детальному воспроизведению биомеханики ходьбы человека, нашей команде удалось создать робота, который совершает шаги более плавно и естественно, что выделяет его на фоне других, подобных ему разработок. Кроме того, Durus способен передвигаться быстрее, чем другие аналогичные роботы», - подытожил профессор Аарон Эймс (Aaron Ames), заведующий лабораторией робототехники при Технологическом институте штата Джорджия.